3.5.1. Introduction¶
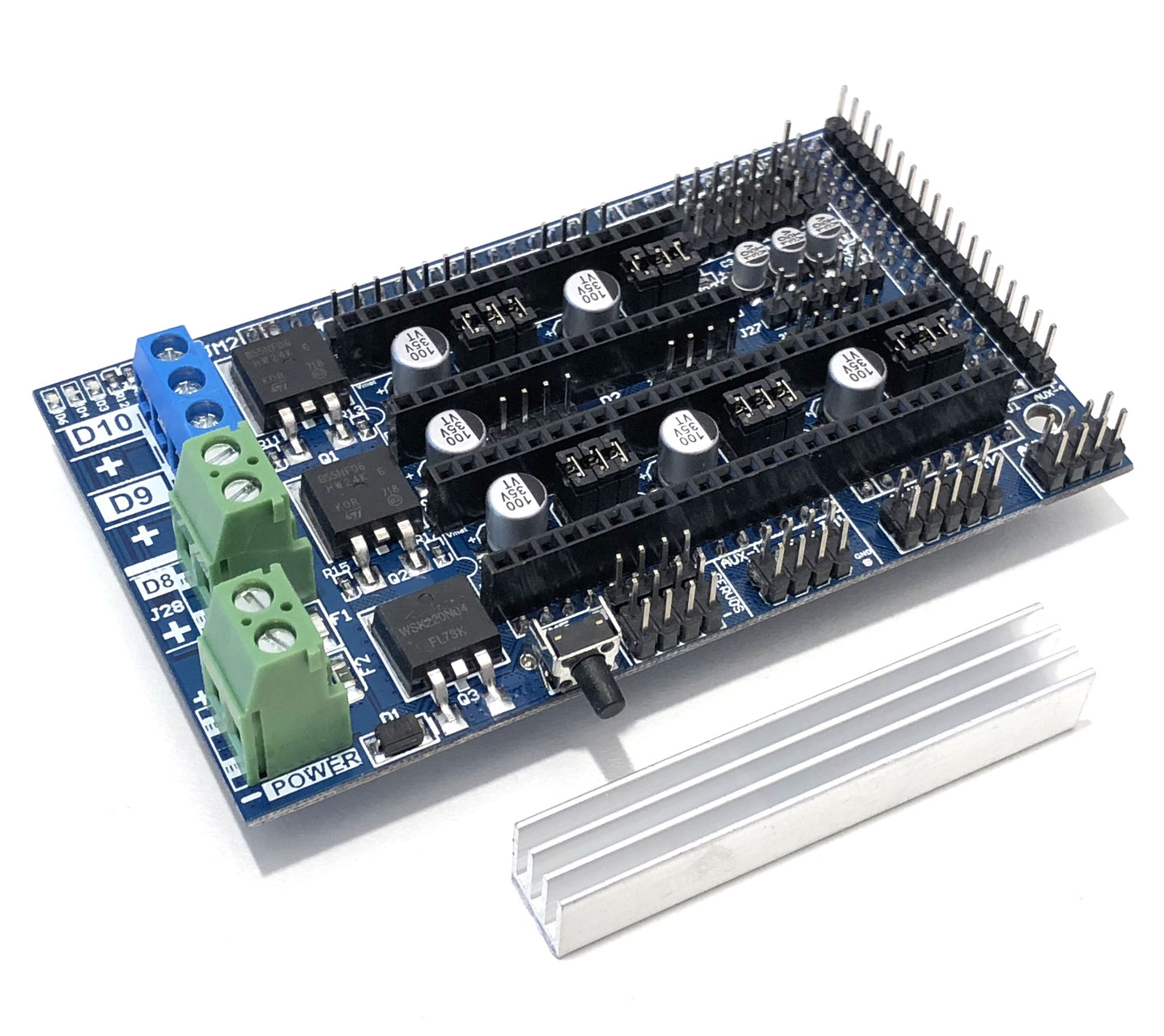
Afin de piloter les roues des robots, nous avons fait le choix d’opter pour des moteur pas à pas (Néma 17 2 phases). Ces derniers ont la possibilité d’être facilement utilisables à partir d’une carte Arduino équippée d’un shield pouvant accueillir jusqu’à 5 drivers de moteurs pas à pas. Le tout forme ce que l’on appelle une RAMPS. C’est un systeme beaucoup utilisé dans le domaine des imprimantes 3D.
3.5.2. Pilotage des moteurs¶
Une fois branché sur une ramps, les Némas peuvent facilement être pilotés par l’Arduino, le tout est de savoir comment.
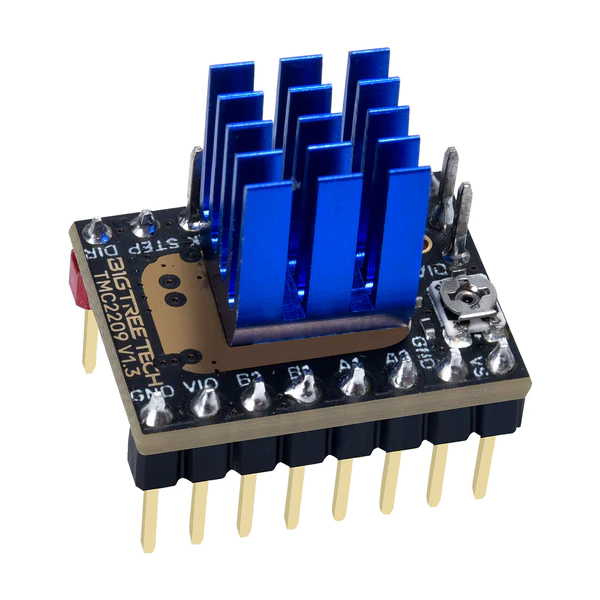
EN : le pin enable permet d’alimenter le moteur, en général un niveau 0 alimentera le moteur et un niveau 1 le coupera
DIR : ce pin permet simplement de définir le sens du moteur selon le niveau logique du pin
STEP : ce pin est le plus important, ce dernier va piloter la vitesse de rotation du moteur. À partir de l’envoi d’un signal carré, chaque période de ce signal permettra d’effectuer un micro pas
MS0, MS1, MS2 : ces pins du drivers vont permettre de choisir le nombre de micro pas à ajouter au Néma. Le control du niveau logique de ces derniers ne se fait pas par l’Arduino mais mais des cavaliers qui se trouvent sous chaque drivers. Pour savoir le nombre de micro pas choisis il faut se réferer à un tableau qui est propre à chaque driver. Placer un cavalier correspond à un niveau logique 1
A1, A2, B1, B2: sont les sorties, ces pins vont directement piloter le bobinage des Némas.
La solution qui est la plus simple à mettre en oeuvre reste de créer une boucle qui inverse l’état du pin de sortie selon une certaine période tel que :
void setup() {
pinMode(13, INPUT);
}
void loop() {
digitalWrite(13, !digitalRead(13));
delayMicroseconds(100);
}
Cette methode à l’avantage d’être tres simple à mettre en oeuvre mais reste très gourmande en temps pour un microprocesseur. Ainsi cette methode reste très bien dans le cas du clignotement d’une led à basse fréquence, mais pour générer un signal carré à haute fréquence cela risque de poser probleme. En effet, dès que l’on ajoute plusieurs moteurs avec cette méthode, la vitesse maximale pouvant être atteinte diminue et un programme plus complet peinera à effectuer le reste de ces intructions. Par ailleurs, il n’est pas non plus garanti que le délais soit respecté et la période de notre signal de sortie risque d’être fortement impactée.
Pour éviter cela, il existe une autre solution, l’utilisation des interruptions.
3.5.3. Les interruptions¶
Afin de piloter les moteurs de manière très précise, nous allons donc utiliser les interruptions. Les interruptions utilisent les timers, ces derniers correspondent à un compteur mais à l’avantage de ne pas être impacté par le niveau d’utilisation du processeur. En d’autres termes, même si le programme est lourd en calcul, le timer continuera de s’incrémenter avec la fréquence du processeur.
C’est là que les interruptions interviennent. Cette dernière est une fonction qui sera executée au moment où un timer aura atteint la valeur voulue. Ainsi, nous allons pouvoir générer un signal carré en inversant l’état d’un port Arduino à chaque fois que le timer atteint la valeur souhaitée, et en faisant varier cette valeur, nous allons pouvoir changer la fréquence de ce signal carré.
Selon les microprocesseurs, les timers sont codés sur un certain nombre d’octets, ainsi lorsque l’on veut se servir d’un timer il faut faire attention à ce que notre période puisse être comptée. Il existe une solution dans le cas où la valeur maximale ne peut pas être atteinte : les pré-scalaires. Il faudra donc attendre qu’un premier registre du timer atteigne la valeur du pré-scalaire avant d’incrémenter de un le registre du timer de l’interruption. Nous pouvons ainsi compter bien plus loin.
Voici comment mettre en place une interruption sur le timer 3 avec Arduino :
pinMode(36, OUTPUT); //création d'un port témoin pour lire le signal
volatile int period = 10000; //création de la période variable
void setup() {
noInterrupt(); //désactivation des interruptions le temps de travailler dessus
TCCR3A = 0; //reset du registre A du timer 3
TCCR3B = 0; //reset du registre B du timer 3
TCCR3B |= B00000001; //écriture dans le registre B du timer 3 pour définir qu'il n'y a pas de pré-scaler
TCNT3 = 0; //remise à 0 du compteur
OCR3A = period -1; //création de la valeur de comparaison
TIMSK3 |= (1 << OCIE3A); // on allume l'interruption sur la comparaison du timer
interrupts(); et on fini par réallumer les interruptions
}
//ici la fonction de l'interruption, elle sera exécutée à chaque fois que la comparaison entre
//la valeur de OCR3A et celle du timer sera égale
ISR(TIMER3_COMPA_vect){
digitalWrite(13, !digitalRead(13)); //inversion du pin 13 pour faire tourner le moteur
OCR3A = period-1; // on réetablie la valeur de comparaison par sécurité
TCNT3 = 0; //on remet le compteur à 0
}
// la variable period peut être modifiée pendant l'évolution du programme
//cela peut se faire directement dans la boucle loop ou dans une fonction via un message ROS ou série par exemple.
//cela se fait en insérant le block suivant:
noInterrupts();
period = newval;
OCR3A = period - 1;
interrupts();
Il suffit maintenant de dupliquer la partie présente dans le setup et le l’interruption en ramplaçant les 3 par le numéro de celui que vous souhaitez utiliser. De cette manière, chaque moteur fonctionnera sur son interruption.
Avertissement
Attention, toute les cartes Arduino ne possèdent pas les mêmes timers. Dans le cas d’une Arduino mega, il y a 4 timers 16 bits ainsi le 1er moteur est contrôler par le timer1, le 2nd par le timer3, le 3eme par le timer4 et enfin le 4eme moteur par le timer5. (Le timer2 est un timer 8bit que nous ne pouvons pas utiliser).
3.5.3.1. !!!!!! confli servo.h !!!!!!!¶
Danger
La bibliothèque servo.h utilise les timers afin de piloter des servomoteurs. À la compilation vous aurez donc une erreur indiquant la sur-utilisation d’un vecteur. Il est donc nécessaire de modifier la bibliotheque pour que cette dernière n’utilise pas le timer que nous utilisons.
Pour cela dirigez-vous dans votre dossier d’installation d’Arduino IDE. Pour moi arduino-1.8.19. Suivez ensuite le chemin suivant: arduino-1.8.19 > libraries > Servo > src > avr
Ouvrer ensuite le fichier ServoTimers.h, trouvez ensuite les lignes suivantes qui correspondent à votre processeur, ici pour un Arduino mega :
// Say which 16 bit timers can be used and in what order
#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__)
#define _useTimer5
#define _useTimer1
#define _useTimer3
#define _useTimer4
typedef enum { _timer1, _timer3, _timer4, _timer5, _Nbr_16timers } timer16_Sequence_t;
Nous allons devoir désactiver l’utilisation de notre timer. Pour cela, on retire tout simplement ce qui mentionne notre timer 3 tel que : (cette action est évidemment applicable pour tous les timers qui devraient être utilisés par des interruptions)
// Say which 16 bit timers can be used and in what order
#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__)
#define _useTimer5
#define _useTimer1
#define _useTimer4
typedef enum { _timer1, _timer4, _timer5, _Nbr_16timers } timer16_Sequence_t;
Nous pouvons maintenant rouvrir ArduinoIDE et recompiler sans encombre notre programme/